ROS-Based Autonomous Driving
A modular ROS-based autonomous driving system developed for the Introduction to ROS course at TUM, integrating perception, planning, decision-making, and control.
🔹 ROS-Based Autonomous Driving Project
Course: Introduction to ROS — Technical University of Munich
Team Members: Oğuzhan Eşen, Aras Fırat, Mert Kulak, Arif Güvenkaya, Hyunji Lee
Repository: GitLab – autonomous_driving_ros
Demo Video: YouTube – Project Demo
🔹 Overview
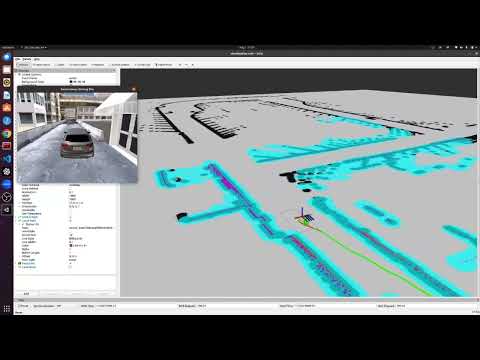
This project demonstrates a ROS-based autonomous driving system developed within the Introduction to ROS course at TUM.
The system drives a simulated car through a Unity-based urban environment, obeying traffic rules, stopping at red lights, and navigating efficiently along a predefined route — all implemented within a modular ROS framework.
The project covers the complete autonomous driving pipeline, including:
- Perception: Environment mapping and traffic light detection
- Path Planning: Global and local trajectory generation using the TEB planner
- Decision Making: Traffic-light–aware velocity control
- Control: Real-time steering, throttle, and braking with PID feedback
🔹 System Architecture
The software stack was designed using the ROS 1 navigation framework and organized into multiple custom nodes communicating via standard ROS topics.
All components can be launched together with a single launch_all.launch file for seamless execution.
1. Perception
-
3D Mapping (OctoMap):
Depth camera images are processed into 3D voxel maps (10 cm resolution) using the OctoMap library.
The map is projected into a 2D occupancy grid for navigation, filtering obstacles within –1 m to +5 m height range. -
Red Light Detection (YOLOv8):
A YOLOv8-medium model detects traffic lights in RGB frames.
HSV color filtering identifies red states, while synchronized depth images estimate distance to the light.
The node publishes:-
/red_light_detected→ True/False -
/red_light_is_close→ True when within 40 m
This forms the primary input for rule-based decision-making.
-
2. Path Planning
The planning pipeline integrates global waypoints, short-term goal selection, and TEB local trajectory generation.
-
Global Waypoint Extraction:
Recorded by manual driving in Unity; filtered via a Python script for smoothness and optimized manually. -
Short-Term Goal Selector:
Publishes sequential navigation goals from the global path to/move_base_simple/goaluntil the mission completes. -
Trajectory Planning (TEB Planner):
The Timed Elastic Band (TEB) local planner computes feasible, collision-free trajectories using both global and local costmaps.
Configurations include:- Vehicle wheelbase: 2.63 m
- Max velocity: 1.2 m/s
- Map resolution: 0.1 m
- Obstacle sensing range: 80 m
3. Decision Making
A lightweight state machine overrides motion commands during red-light events.
If both /red_light_detected and /red_light_is_close are true, the vehicle halts by publishing zero velocity to /last_vel.
Otherwise, it forwards the TEB planner’s velocity commands, ensuring safety and compliance with traffic rules.
4. Control
The controller node translates planner velocities into steering, throttle, and brake commands for the Unity simulator.
- Path Tracking: Implemented via a Pure Pursuit algorithm using vehicle kinematics.
- PID Steering Control: Maintains heading alignment with smooth corrections (limited to ±0.698 rad).
- PID Speed Control: Adjusts throttle and brake proportionally to velocity error for smooth acceleration and stopping.
This control logic ensures stable navigation across complex intersections and curves.
🔹 ROS Graph
The system includes multiple custom nodes under packages such as:
-
perception→ Octomap & YOLOv8 detection -
planning→ Global and local trajectory generation -
decision_making→ State machine logic -
controller→ PID & Pure Pursuit control
All nodes are connected through standard ROS topics forming a complete autonomy loop from sensor input → perception → planning → control.
🔹 Results
- The car successfully navigates the full route without collisions.
- Stops correctly at red lights detected by YOLO.
- Maintains smooth, kinematically feasible trajectories using the TEB planner.
- Demonstrates modularity and real-time synchronization across all ROS nodes.
🔹 References
- Rösmann, C. – teb_local_planner, ROS Wiki
- Pure Pursuit Algorithm – Algorithms for Automated Driving (GitHub Pages)